中国科学技术大学和vivo移动通信有限公司的研究人员推出一种单步扩散模型 DepthMaster,,旨在将扩散模型应用于单目深度估计(Monocular Depth Estimation, MDE)。该方法通过优化扩散模型的生成特征,使其更适合于判别性的深度估计任务。DepthMaster通过引入特征对齐模块(Feature Alignment Module)和傅里叶增强模块(Fourier Enhancement Module),在保持高推理速度的同时,显著提高了模型的泛化能力和细节保留能力。
例如,DepthMaster可以从一张单目RGB图像中准确估计出场景的深度信息,如在自动驾驶场景中,能够从道路前方的图像中估计出车辆、行人和建筑物的距离,为自动驾驶系统提供重要的深度信息支持。

主要功能
- 单步推理:通过单步确定性范式,将RGB图像直接转换为深度图,显著提高了推理速度。
- 深度估计:能够从单目图像中估计出场景的深度信息,适用于各种复杂场景。
- 细节保留:通过傅里叶增强模块,有效地保留了深度图中的细节信息,提高了视觉质量。
主要特点
- 特征对齐模块:通过引入高质量的外部语义特征,对齐扩散模型的特征分布,增强模型对场景结构的感知能力,减少对纹理细节的过度拟合。
- 傅里叶增强模块:在频域中自适应地平衡低频结构特征和高频细节特征,模拟多步去噪过程中的细节优化,提高深度图的视觉质量。
- 两阶段训练策略:第一阶段专注于学习全局场景结构,第二阶段优化细节保留,充分发挥两个模块的潜力。
工作原理
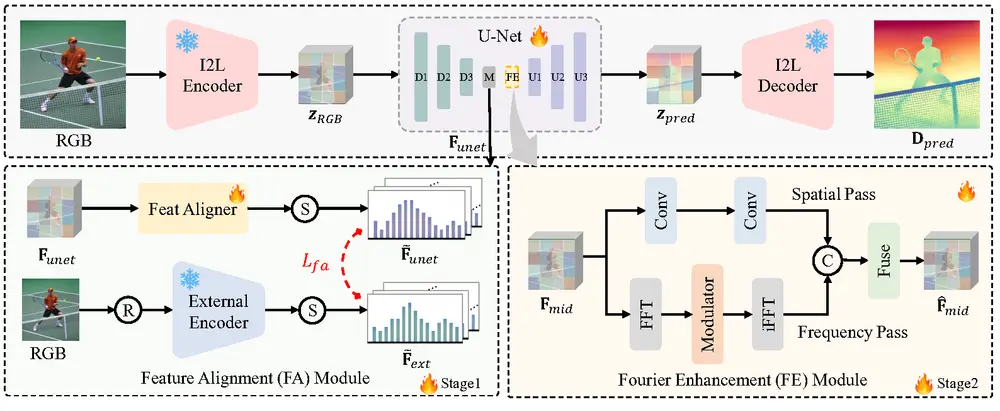
- 单步确定性范式:将RGB图像通过图像到潜在空间(I2L)编码器编码为潜在表示,然后通过去噪网络(U-Net)直接生成深度图。
- 特征对齐模块:通过多层感知机(MLP)将U-Net的特征映射到外部编码器的特征空间,并通过最小化Kullback-Leibler散度来对齐特征分布。
- 傅里叶增强模块:在频域中对U-Net的中间特征进行处理,通过快速傅里叶变换(FFT)和逆变换(iFFT)来增强高频细节特征。
- 两阶段训练策略:第一阶段主要在潜在空间进行监督,第二阶段在像素空间进行监督,并引入加权多方向梯度损失来增强边缘细节。
具体应用场景
- 自动驾驶:在自动驾驶领域,为车辆提供准确的环境深度信息,帮助车辆识别道路、障碍物和其他车辆的距离,对于自动驾驶系统的决策制定(如避障、路径规划等)至关重要,可提高自动驾驶的安全性和可靠性。
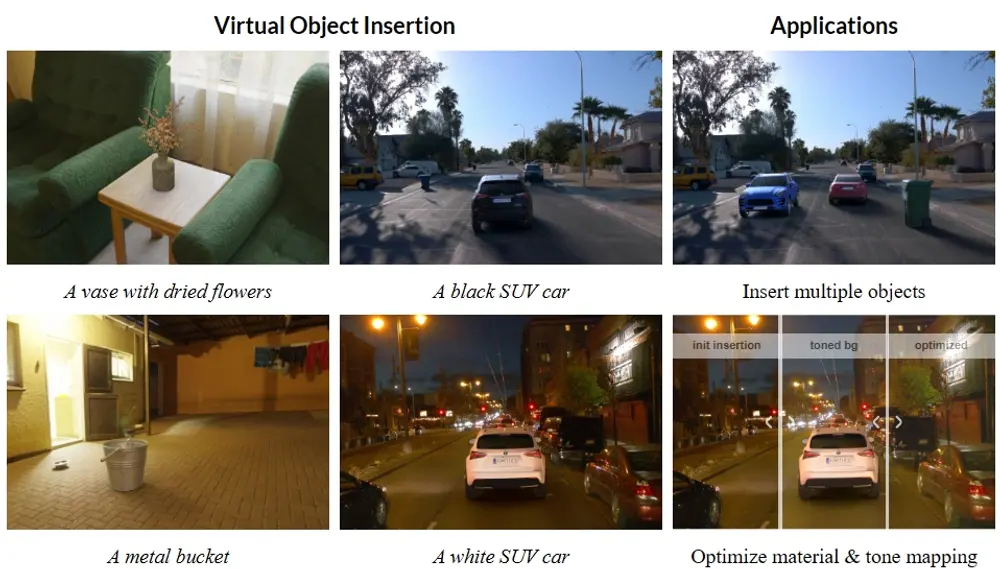
- 虚拟现实(VR)与增强现实(AR):在 VR 和 AR 应用中,能够根据场景的深度信息实现更加真实的虚拟物体与现实场景的融合,提升用户的视觉体验和沉浸感,例如在 AR 导航应用中,准确的深度估计可以使虚拟导航指示更加自然地叠加在现实场景中。
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章



暂无评论...