Genesis 是一个为通用机器人、具身AI和物理AI应用设计的综合性物理仿真平台。它结合了多种功能,旨在提供一个高效、灵活且用户友好的工具,帮助研究人员和开发者在虚拟环境中模拟复杂的物理现象、生成高质量的数据,并测试各种机器人策略。
它同时具备多种功能:
- 一个从头开始重新构建的通用物理引擎,能够模拟广泛的材料和物理现象。
- 一个轻量级、超快、Pythonic且用户友好的机器人仿真平台。
- 一个强大且快速的照片级真实感渲染系统。
- 一个生成数据引擎,能够将用户提示的自然语言描述转化为多种模态的数据。
Genesis由一个从头开始重新设计和构建的通用物理引擎驱动,该引擎集成了各种物理求解器及其耦合,形成了一个统一的框架。这个核心物理引擎进一步通过一个生成代理框架得到增强,该框架在更高层次上运行,旨在为机器人及其他领域实现全自动数据生成。
核心特性
1、从头构建的通用物理引擎
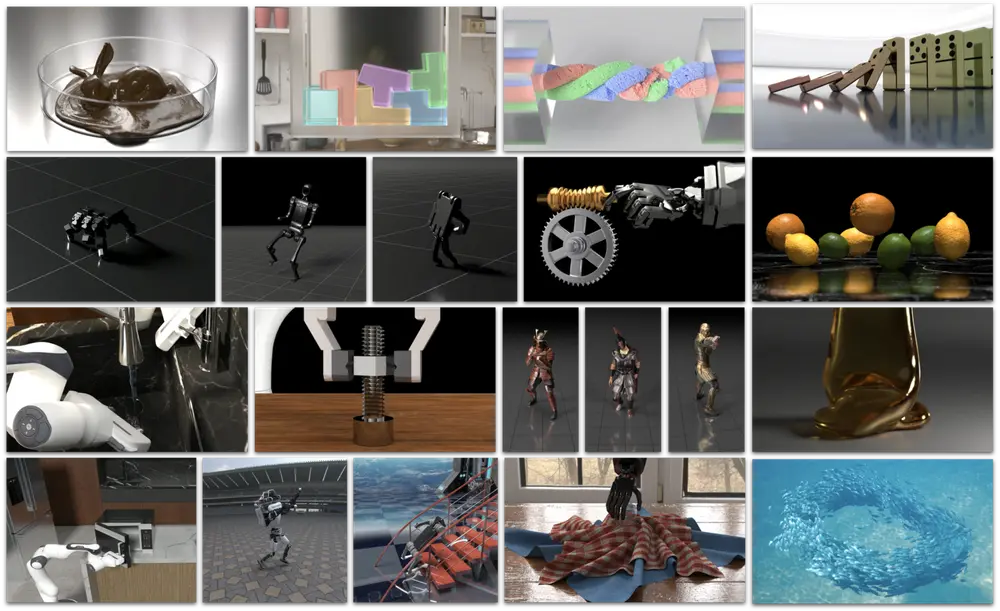
- 统一的仿真框架:Genesis开发了一个统一的仿真框架,集成了多种物理求解器(刚体、MPM、SPH、FEM、PBD、稳定流体),形成了一个强大的核心物理引擎。
- 广泛的材料模型支持:能够模拟刚体和关节体、液体、气体、可变形物体、薄壳物体和颗粒材料等,支持多物理场耦合。
2、轻量级、超快的机器人仿真平台
- 前所未有的仿真速度:在单个RTX 4090上模拟Franka机械臂时,帧率达到超过4300万FPS(比实时快43万倍)。
- 跨平台支持:原生支持Linux、MacOS、Windows以及不同计算后端(CPU、Nvidia GPU、AMD GPU、Apple Metal)。
- 广泛的机器人支持:支持机械臂、足式机器人、无人机、软体机器人等多种类型的机器人,并广泛支持加载不同文件类型(MJCF、URDF、.obj、.glb、.ply、.stl等)。
3、照片级真实感渲染系统
- 高性能光线追踪器:支持基于光线追踪的原生渲染,确保生成的图像具有极高的视觉保真度。
- 可微性:设计为完全兼容可微仿真,目前MPM求解器和工具求解器是可微的,其他求解器的可微性将很快添加(从刚体仿真开始)。
4、生成数据引擎
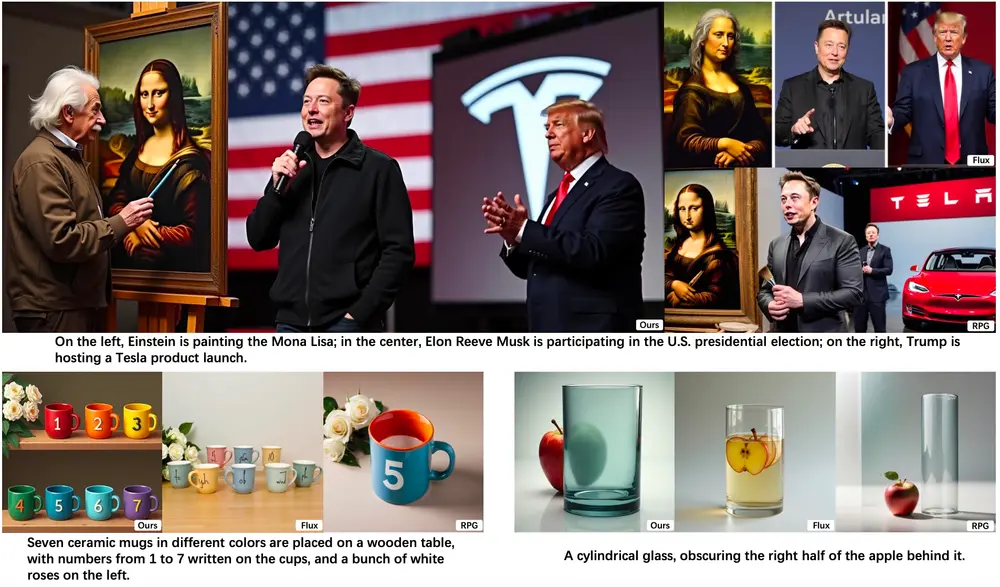
- 自动化数据生成:通过生成代理框架,自动将用户提示的自然语言描述转化为多种模态的数据,包括物理准确且空间一致的视频、相机运动与参数、人类和动物角色动作、机器人操作与运动策略、完全交互的3D场景、开放世界关节物体生成、语音音频、面部动画与情感等。
- 模块化系统:生成框架是一个模块化系统,包含许多不同的生成模块,每个模块处理一定范围的数据模态,由一个高级代理进行路由。这些模块可以集成现有的研究论文成果,也可以开发新的生成算法。
5、用户友好性
- 简单易用:Genesis的设计旨在使仿真使用尽可能简单,提供Pythonic接口,方便用户快速上手。
- 优化性能:利用GPU加速的并行计算,具有优化碰撞检测、自动休眠、接触岛等功能,确保在各种场景中提供高效的仿真性能。
长期使命
- 降低使用物理仿真的门槛:使机器人研究对每个人都触手可及,减少进入壁垒。
- 统一先进的物理求解器:将多种物理求解器集成到一个单一框架中,允许在虚拟领域中以最高的物理、视觉和感官保真度重新创建整个物理世界。
- 最小化数据收集的人力成本:通过自动化数据生成,减少手动数据收集的需求,让数据飞轮自行旋转。
应用场景
- 物理准确的视频生成:通过生成代理框架,自动生成物理准确且视角一致的视频,适用于电影制作、游戏开发等领域。
- 角色动作生成:自动生成人类和动物角色的动作,用于动画制作、虚拟现实等应用。
- 机器人策略生成:自动生成不同场景下各种技能的机器人策略和演示数据,帮助研究人员测试和优化机器人算法。
- 3D与完全交互场景生成:生成完全交互的3D场景,适用于虚拟现实、增强现实等应用。
- 开放世界关节物体生成:生成复杂的开放世界环境中的关节物体,如家具、机械装置等,用于机器人训练和测试。
- 软体机器人:模拟生成的软体或混合(软皮肤和刚性骨架)机器人,探索新型机器人的设计和控制策略。
- 语音音频、面部动画与情感生成:生成逼真的语音音频、面部动画和情感表达,适用于虚拟助手、游戏角色等应用。
未来展望
Genesis目前正在开源底层物理引擎和仿真平台,生成框架的访问将在不久的将来逐步推出。未来,Genesis将继续扩展其功能,增加更多生成模块和支持更多的物理求解器,进一步提升仿真精度和效率。同时,Genesis团队致力于降低使用门槛,让更多研究人员和开发者能够轻松利用这一强大的工具进行创新和研究。
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章


暂无评论...