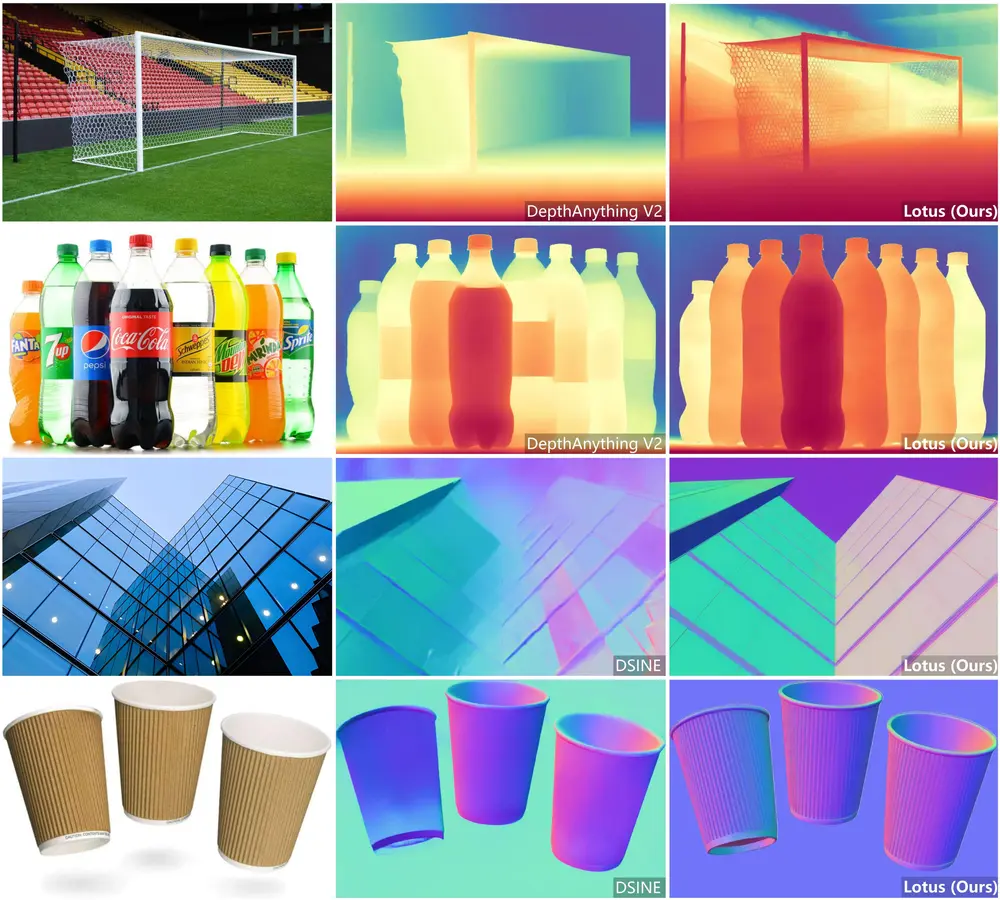
香港科技大学(广州)、阿德莱德大学、诺亚方舟实验室和香港科技大学的研究人员推出新型视觉基础模型Lotus,它使用扩散模型来生成高质量的密集预测结果。简单来说,Lotus就像一个超级聪明的图像处理专家,它能够从单张图片中预测出许多详细的信息,比如物体的深度(离相机有多远)和表面法线(物体表面的倾斜方向)。
Lotus是一个基于扩散的视觉基础模型,具有简单而有效的密集预测适应协议。具体来说,Lotus被训练为直接预测注释而不是噪声,从而避免了有害的方差。研究团队还重新表述了扩散过程为单步过程,简化了优化并显著提高了推理速度。此外,研究团队引入了一种称为细节保留器的新颖调优策略,实现了更准确和细粒度的预测。在不扩大训练数据或模型容量的情况下,Lotus在各种数据集上的零样本深度和法线估计中达到了最先进的性能。它还显著提高了效率,比大多数现有的基于扩散的方法快数百倍。
主要功能
Lotus的主要功能包括:
- 零样本深度估计:在没有见过的场景中,仅通过单张图片预测物体的深度信息。
- 零样本表面法线估计:预测图像中每个像素点的表面法线信息。
- 细节保留:在进行深度和法线预测时,保持图像细节,尤其是在复杂区域。
主要特点
- 高质量预测:即使在只有少量训练数据的情况下,也能生成高质量的预测结果。
- 速度快:与大多数现有的基于扩散的方法相比,Lotus的推理速度快数百倍。
- 简单有效:Lotus通过直接预测注释而不是噪声,简化了优化过程,并显著提高了推理速度。
工作原理
Lotus的工作原理可以分为以下几个步骤:
- 编码:使用预训练的自动编码器(比如VAE)将输入图像编码成潜在空间的表示。
- 扩散过程:在潜在空间中进行单步扩散过程,从纯噪声状态快速转换到干净的输出。
- 预测:使用训练好的U-Net模型(一种常用的卷积神经网络)预测出图像的注释(比如深度图或法线图)。
- 细节保留器:通过在训练过程中加入图像重建任务,帮助模型在生成密集预测时保留输入图像的细节。
具体应用场景
- 3D/4D重建:在3D建模或增强现实中,使用Lotus预测图像中物体的深度和表面法线,以生成更真实的3D模型。
- 自动驾驶:在自动驾驶系统中,利用Lotus进行精确的深度估计,帮助车辆理解周围环境。
- 虚拟现实:在虚拟现实应用中,使用Lotus生成的深度和法线信息增强场景的真实感和沉浸感。
总的来说,Lotus通过其创新的扩散模型适应协议,在不需要大量训练数据的情况下,实现了高质量的密集预测,这为各种视觉计算任务提供了新的可能性。
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章


暂无评论...