,它专门设计用于在长视频中跟踪任意点。TAPTRv3是建立在TAPTRv2基础上的,主要目标是提高在长时间视频序列中跟踪点的鲁棒性。这个系统对于视频编辑、SLAM(同时定位与地图构建)、视频操作等下游任务具有重要意义,因为这些任务需要精确的点轨迹和可见性信息。
例如,在视频编辑中,我们可能需要跟踪一个演员在一系列镜头中的位置,以便在后期制作中进行特效添加或场景合成。TAPTRv3能够准确地跟踪视频中任意点的位置变化,即使在复杂的背景和摄像机运动下也能保持稳定。
主要功能和特点
- 空间和时间上下文的利用:TAPTRv3通过结合空间和时间上下文信息,提高了特征查询的质量,从而在长视频中实现更稳健的跟踪。
- Context-aware Cross-Attention (CCA):这是一种新的空间特征查询方法,它利用周围空间上下文来增强图像特征查询时的注意力分数质量。
- Visibility-aware Long-Temporal Attention (VLTA):这是一种新的时间特征查询方法,它在考虑对应可见性的同时,对所有过去的帧进行时间注意力计算,有效解决了TAPTRv2中由于RNN类长时建模引起的特征漂移问题。
- 全局匹配模块:当检测到场景切换时,TAPTRv3会触发全局匹配模块,以重新初始化点查询的位置部分,确保在遇到突然大幅度运动时能够快速重新建立跟踪。
工作原理
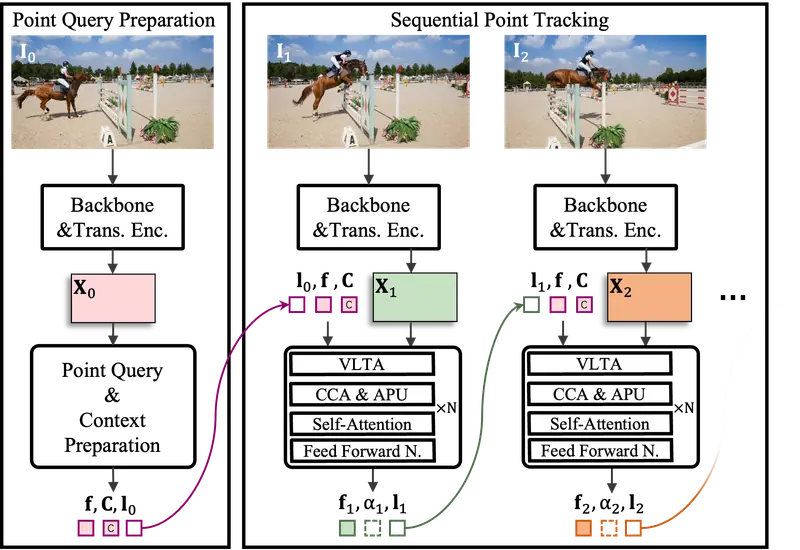
TAPTRv3的工作原理基于以下几个关键步骤:
- 点查询准备:在初始帧中,系统会采样点级特征和空间上下文特征来描述目标跟踪点。
- 序列点跟踪:对于每个新帧,系统将利用多层变换器解码器来精细化点查询的内容和位置部分,通过CCA和VLTA等操作来检测目标跟踪点。
- 特征更新:系统会根据可见性预测和时间上下文信息来更新点查询的特征,以此来补偿特征随时间的变化。
- 全局匹配触发:在检测到场景切换时,系统会使用全局匹配来重新初始化点查询的位置部分,以便快速恢复跟踪。
具体应用场景
- 视频编辑:在视频编辑中,TAPTRv3可以跟踪视频中的特定点,以便在不同镜头间进行特效合成或对象替换。
- SLAM:在SLAM系统中,TAPTRv3可以用于跟踪视频中的特征点,以帮助机器人或自动驾驶车辆进行定位和地图构建。
- 视频监控:在视频监控领域,TAPTRv3可以跟踪特定目标,如行人或车辆,以进行行为分析或安全监控。
- 增强现实:在增强现实应用中,TAPTRv3可以跟踪用户的视线或手势,以提供更自然的人机交互方式。
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章



暂无评论...