德克萨斯大学奥斯汀分校和谷歌的研究人员推出新型图像匹配技术OmniGlue,这是首个以泛化为核心设计原则的可学习图像匹配器。OmniGlue利用来自视觉基础模型的广泛知识来指导特征匹配过程,从而增强了对训练时未见过的领域的泛化能力。此外,开发人员还提出了一种新颖的关键点位置引导注意力机制,该机制能够将空间和外观信息分离,进而提升了匹配描述符的性能。
图像匹配,简单来说,就是让计算机能够识别和匹配两幅图片中相同的物体或场景。这在很多领域都非常有用,比如在地图制作、3D建模、机器人导航等场景中,都需要用到这项技术。
主要功能:
OmniGlue的主要功能是提高图像匹配的泛化能力,也就是说,它能够在训练时未见过的新的图像领域中也能很好地工作。这就好比一个人学会了骑自行车,之后即使换一辆不同的自行车,他还是能够骑得很好。
主要特点:
- 泛化能力强:OmniGlue使用了一种视觉基础模型(DINOv2)来指导图像匹配过程,这使得它能够更好地适应新的图像领域。
- 关键点位置引导的注意力机制:它通过一种新颖的机制来分离空间信息和外观信息,从而提高匹配描述符的性能。
- 实验验证:在7个不同图像领域的数据集上进行了全面实验,包括场景级、物体中心和航拍图像。
工作原理:
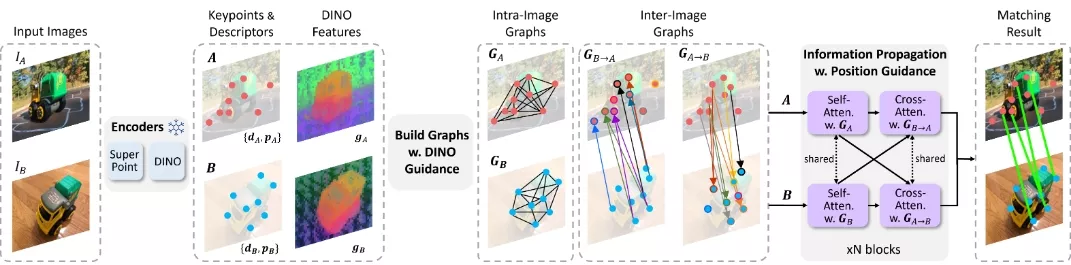
OmniGlue的工作原理可以分解为以下几个步骤:
- 特征提取:使用SuperPoint和DINOv2两种编码器从两张图片中提取特征。
- 构建图:基于这些特征,构建关键点之间的关联图,包括图片内部和图片之间的关键点。
- 信息传播:通过自注意力和交叉注意力层在关键点之间传播信息,同时使用DINOv2的特征来指导这一过程。
- 匹配结果生成:利用更新后的关键点描述符产生匹配结果。
具体应用场景:
OmniGlue可以应用于多种场景,例如:
- 3D重建:通过匹配不同视角下的图像,帮助重建出场景的三维模型。
- 机器人导航:让机器人通过图像匹配来识别和导航环境。
- 地图制作:在创建地理信息系统(GIS)时,匹配不同来源的图像来构建地图。
- 增强现实(AR):在AR应用中,通过图像匹配技术,可以将虚拟信息叠加到现实世界的图像上。
总的来说,OmniGlue通过其创新的技术手段,提高了图像匹配技术的泛化能力,使其在多种不同的图像领域和实际应用中都能表现出色。
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章


暂无评论...