由网易、北京航空航天大学、清华大学与香港城市大学联合研究团队提出,LatticeWorld 是一个面向复杂 3D 虚拟环境自动生成的新框架。它通过融合轻量级大型语言模型(LLM)与工业级渲染引擎,探索了一条从多模态指令到可交互 3D 场景的端到端生成路径。
该框架支持以文本描述和视觉输入(如草图、高度图)作为引导,自动构建包含动态智能体、具备高保真物理特性的大规模虚拟世界,已在游戏开发、具身 AI 训练和自动驾驶仿真等场景中展现出显著潜力。
最重要的是,在保持创意质量的前提下,LatticeWorld 将传统人工建模流程的生产效率提升超过 90 倍。
为什么需要自动化 3D 世界生成?
在具身智能、自动驾驶测试、元宇宙应用等领域,对高质量 3D 环境的需求持续增长。然而,当前主流方式仍依赖美术人员手工建模,存在三大瓶颈:
- 成本高:构建一个中等复杂度的城市街区可能需数周人力;
- 迭代慢:修改布局或调整光照条件需重新导出资源;
- 扩展难:难以快速生成多样化、语义合理的场景变体。
尽管已有部分研究尝试用 AI 自动生成 3D 内容,但多数局限于静态几何或低物理保真度,无法满足真实任务需求。
LatticeWorld 的目标,正是解决这一“高真实性”与“高生成效率”难以兼顾的问题。
系统架构:连接语义理解与工业渲染
LatticeWorld 并非替代现有图形管线,而是作为上游智能层,嵌入到成熟的工业流程中。其核心设计思想是:用轻量模型做决策,用专业引擎做执行。
框架整体分为三个阶段:
1. 场景布局生成(Scene Layout Generation)
输入:文本指令(如“一片被雪山环绕的湖泊”)+ 视觉先验(如地形高度图或手绘草图)
处理:由训练好的多模态 LLM(LLML)解析输入,输出结构化符号表示(例如对象类别、相对位置、层级关系)
输出:转换为渲染引擎可读的布局张量(scene layout tensor),用于后续实例化
模型采用轻量级 LLaMA-2-7B 架构,经特定领域数据微调,在推理速度与语义准确性之间取得平衡。
2. 环境配置生成(Environment Configuration)
基于已生成的布局,进一步细化环境属性:
- 天气状态(晴天/雨天/雾)
- 光照方向与强度
- 材质分布(草地、砂石、水面)
- 动态智能体参数(类型、行为规则、初始状态)
此阶段由专用配置模型(LLMC)完成,确保语义一致性与物理合理性。
3. 渲染与运行时集成
将生成的布局与配置导入 Unreal Engine 5 等工业级引擎,完成最终资源绑定、光照烘焙与物理模拟设置。生成的世界支持:
- 实时渲染(60 FPS+)
- 高保真物理交互(NVIDIA PhysX)
- 多智能体自主行为(基于行为树或强化学习策略)
此外,用户可通过主控角色进入场景,与其他代理进行实时互动,适用于训练和测试闭环系统。
关键技术优势
✅ 支持多模态输入控制
不同于仅依赖文本提示的方法,LatticeWorld 允许用户通过多种方式表达意图:
- 文本描述定义语义内容;
- 高度图指定地形起伏;
- 手绘草图划定功能区域(如道路走向、建筑群落);
这种灵活性显著提升了生成结果的可控性与实用性。
✅ 内置动态代理与交互逻辑
生成的环境中可包含多个具备感知与决策能力的智能体,支持预设行为模式,例如:
- 当主角进入警戒范围时触发追踪;
- 在开放区域执行巡逻任务;
- 根据天气变化调整移动策略。
这使得 LatticeWorld 不仅能生成“静态布景”,更能构建可用于算法验证的“活”的世界。
✅ 高效且可扩展的架构设计
- 轻量化模型驱动:使用 7B 级别 LLM 即可完成复杂语义解析,降低部署门槛;
- 模块化解耦:各生成阶段独立训练与替换,便于适配不同渲染后端;
- 兼容 OpenAI 接口标准:未来可接入其他兼容 API 的本地或云端模型服务。
实验评估:性能与效率双优
研究团队在多个基准任务上对 LatticeWorld 进行了全面测试,关键结果如下:
| 指标 | 表现 |
|---|---|
| 📐 场景布局准确率 | 在固定与可变地形条件下均优于 GPT-4o、Claude 3.7 Sonnet、DeepSeek-R1 和 Qwen2-VL-Max |
| 🖼️ 视觉保真度(FID) | 相比基线方法平均降低 28% |
| ⏱️ 单场景生成时间 | 平均 42 秒(含模型推理与引擎初始化) |
| 🔄 生产效率提升 | 较传统人工流程提速 90 倍以上 |
| 🤖 智能体行为合理性 | 用户调研显示 86% 认为其行为符合预期 |
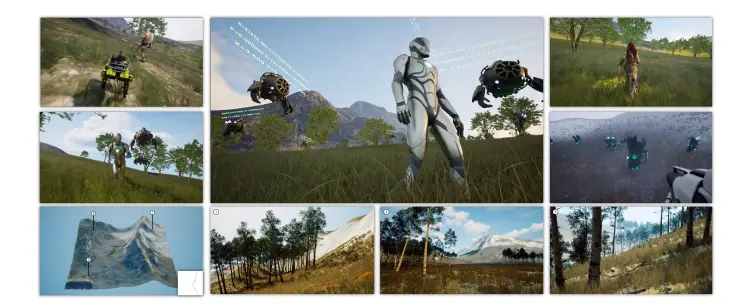
尤其值得注意的是,在“山地湖畔村落”“城市交叉路口”等复杂自然与城市场景中,LatticeWorld 能稳定生成语义合理、空间协调的结果,且无需后期人工修正。
应用场景展望
LatticeWorld 的潜力不仅限于单一领域,已在多个方向展现适用性:
- 游戏开发:快速生成关卡原型,加速内容迭代;
- AI 训练沙盒:为具身智能体提供多样化、可交互的训练环境;
- 自动驾驶仿真:按需构造极端交通场景,提升测试覆盖率;
- 城市规划辅助:结合地理数据生成可视化城市模型。
随着多模态理解与物理模拟技术的进步,这类“指令驱动”的世界生成系统有望成为下一代数字孪生基础设施的核心组件。
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章




暂无评论...