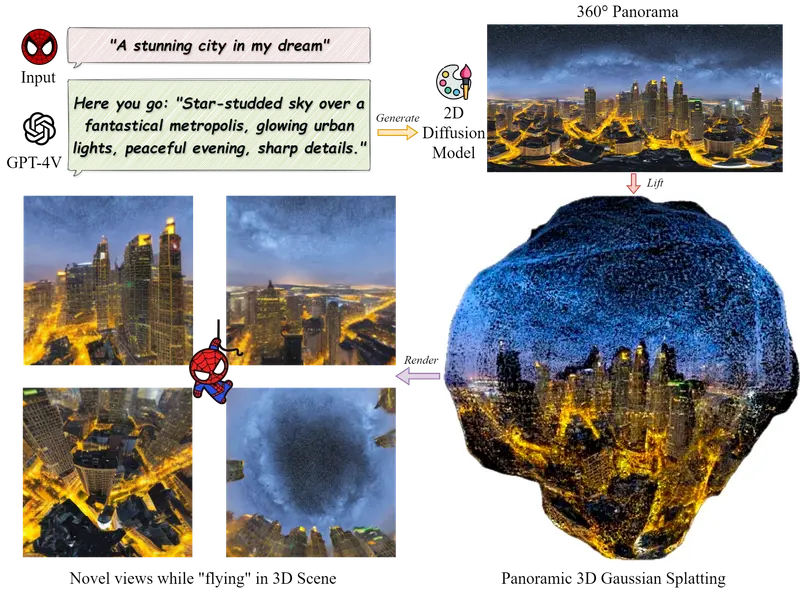
在 3D 内容创作工作流中,360° 全景图(等距柱状投影) 是一种极易获取的资产(可通过 AI 生成、360 相机拍摄或游戏引擎渲染获得)。然而,全景图本质上是 2.5D 的——它只有一个视点,物体背后是空的,无法支持真正的 6-DoF(六自由度)漫游。
ComfyUI-DreamScene360 是一个专为 ComfyUI 设计的自定义节点,封装了 DreamScene360 的核心算法,能够直接将一张 360° 全景图 + 深度图 转化为 全局一致、填补了空洞的 3D 高斯泼溅 (3DGS) 点云。
- GitHub:https://github.com/jfirma1/ComfyUI-DreamScene360
无需复杂的文本提示工程,无需调用昂贵的 API,只需输入图像,即可输出标准的 .ply 文件,无缝接入下游的 3D 渲染、编辑或视频生成节点。
核心魔法:从“平面球”到“立体世界”
该节点不仅仅是简单的深度反投影,它复现了 DreamScene360 论文中的完整重建管线,解决了单视角全景图的固有缺陷:
- 🔄 切平面投影 (Cube Projection):将球形全景图重投影为多个重叠的透视裁剪区域,模拟多视角输入。
- 📏 单目深度估计:在每个裁剪区域上运行强大的
omnidata_dpt_depth_v2模型,提取高精度深度。 - 🧩 全局深度对齐:利用泊松融合 (Poisson Fusion) 将所有局部深度图拼接成连贯的全景深度场,消除接缝。
- 🧠 MLP 神经优化:通过小型神经网络平滑跨接缝的深度不连续性,修复几何瑕疵。
- ☁️ 点云重投影:将对齐后的深度反投影到 3D 世界空间,生成初始点云。
- ✨ 高斯溅射训练:以点云为初始化,针对原始全景图进行 3DGS 优化,自动“脑补”并填充被遮挡的空洞区域,生成真正的 volumetric 3D 场景。
节点详解
1. DreamScene360 Pano to Pointcloud (主节点)
这是核心处理单元,负责执行完整的重建流程。
| 参数 | 默认值 | 描述与建议 |
|---|---|---|
| scene_name | my_scene | 缓存键。相同名称会复用已生成的 .ply 文件,跳过耗时训练。 |
| iterations | 3000 | 高斯溅射训练步数。建议: 先用 3000 步预览,最终输出用 9000 步。 |
| opacity_threshold | 0.05 | 过滤掉透明度低于此值的噪点高斯,净化点云。 |
| max_points | 500000 | 输出点云的最大点数限制,用于控制显存占用。 |
| upscale | false | 若设为 true,处理前将全景图放大 2 倍,显著提升几何细节(需更多显存)。 |
| skip_if_exists | true | 强烈推荐开启。若该 scene_name 已训练过,直接加载缓存,秒级响应。 |
输入:
panorama: 360° 等距柱状投影图像 (推荐分辨率 4096x2048+)。depth_map: 匹配的深度图 (灰度图)。若不提供,节点内部可尝试生成,但提供高质量深度图效果更佳。
输出:
pointcloud: 包含points,colors,ply_path的字典,可直接连接至 3D 查看器或编辑器。panorama_passthrough: 原始全景图直通。depth_passthrough: 原始深度图直通。
2. Load Gaussian PLY (工具节点)
- 功能: 直接加载任何现有的
.ply文件(无论是本节点之前生成的,还是外部工具创建的)。 - 用途: 允许你将训练好的 3D 资产持久化,并在不同工作流中重复使用,无需重新训练。
性能与速度
得益于 3DGS 的高效性,即使在消费级显卡上,生成速度也令人印象深刻:
| GPU 型号 | 3,000 次迭代 (预览) | 9,000 次迭代 (成品) |
|---|---|---|
| NVIDIA A100 | ~3 分钟 | ~8 分钟 |
| RTX 4090 | ~4 分钟 | ~12 分钟 |
| RTX 3090 | ~6 分钟 | ~18 分钟 |
| RTX 4080/4070 | ~5-7 分钟 | ~15-20 分钟 |
提示: 开启
skip_if_exists=true后,第二次运行仅需 <1 秒 即可加载结果。
安装指南
方式 A:自动安装 (推荐)
cd /path/to/ComfyUI/custom_nodes
git clone https://github.com/YOUR_USERNAME/ComfyUI-DreamScene360.git
cd ComfyUI-DreamScene360
python install.py
脚本会自动克隆引擎、安装依赖、构建 CUDA 扩展并下载必要的检查点。
方式 B:手动安装 (进阶)
若自动脚本失败,可手动执行以下步骤:
- 克隆仓库:
git clone --recursive https://github.com/ShijieZhou-UCLA/DreamScene360.git dreamscene360_engine - 安装系统依赖 (Ubuntu/Debian):
sudo apt-get install -y libglm-dev libglew-dev libassimp-dev libboost-all-dev libgtk-3-dev libopencv-dev libglfw3-dev libavdevice-dev libeigen3-dev - 安装 Python 包:
pip install plyfile open3d trimesh scipy einops timm opencv-python scikit-image omegaconf - 构建 CUDA 扩展:
pip install dreamscene360_engine/submodules/diff-gaussian-rasterization-depth pip install dreamscene360_engine/submodules/simple-knn pip install git+https://github.com/NVlabs/tiny-cuda-nn/#subdirectory=bindings/torch - 下载检查点:
- 下载
omnidata_dpt_depth_v2.ckpt(从 DreamScene360 官方 Dropbox 链接)。 - 放置路径:
ComfyUI-DreamScene360/dreamscene360_engine/pre_checkpoints/omnidata_dpt_depth_v2.ckpt
- 下载
最佳实践工作流
- 生成/获取全景图: 使用 SDXL/Midjourney 生成 360° 全景图,或用 360 相机拍摄。
- 估算深度: 使用 ComfyUI 中的
ZoeDepth或MiDaS节点生成对应的深度图(确保也是等距柱状投影格式)。 - 运行转换: 连接至
DreamScene360 Pano to Pointcloud节点。- 设置
scene_name = "cyberpunk_city"。 - 设置
iterations = 3000进行快速测试。
- 设置
- 预览与迭代: 连接 3D 查看器节点,确认几何结构无误。
- 最终输出: 将
iterations改为9000,upscale = true(若显存允许),再次运行以获得最高质量。 - 下游应用: 将输出的
.ply用于:- 视频生成: 结合 SVD 或 Gen-2 制作运镜视频。
- VR 体验: 导出至 Unity/Unreal 引擎。
- 二次编辑: 使用 3D 编辑工具移除物体或添加新元素。
⚠️ 注意事项与故障排除
- 显存不足 (OOM):
- 解决方案:设置
upscale = false,降低max_points至 200,000,或减少iterations。 - 确保关闭其他占用显存的应用。
- 解决方案:设置
- 几何接缝明显:
- 通常是因为输入的深度图质量不佳。尝试使用更高分辨率的深度估计模型,或确保全景图与深度图严格对齐。
- CUDA 编译错误:
- 确保已安装完整的 CUDA Toolkit (
nvcc --version应可用)。 - 安装
libglm-dev(sudo apt-get install libglm-dev) 常能解决光栅化器编译问题。
- 确保已安装完整的 CUDA Toolkit (
- 缓存管理:
- 生成的
.ply文件保存在ComfyUI-DreamScene360/output/{scene_name}/。定期清理不需要的场景以释放磁盘空间。
- 生成的
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章

暂无评论...