美国明星机器人公司 Figure发布了一段长达 60 分钟的无删减视频中展示了其旗舰产品 Figure 2 人形机器人 在真实物流环境(快递分拣)中持续工作的能力。
Figure 2 搭载的是Figure自己训练的新一代通用视觉-语言-动作(VLA)神经网络模型——Helix,这段视频没有任何人为干预,也未使用传统硬编码控制逻辑,完全依赖训练所得的Helix进行自主决策与操作。
如今,Helix 已能处理更复杂、更多样的包裹类型,在速度和准确性方面持续提升,接近人类操作员水平,标志着基于学习的机器人方法正在从实验室走向现实世界。
Helix 是什么?它为何重要?
Helix 是 Figure 自主研发的统一神经网络系统,集成了:
- 视觉感知
- 语言理解
- 动作控制
这套系统不依赖传统硬编码逻辑,而是通过大规模演示数据训练出一个具备触觉反馈、短期记忆能力和自适应行为的智能体。
它的核心目标是:让机器人像人一样观察、思考并执行复杂的物理任务,特别是在高度变化的物流环境中。
三大核心性能提升
✅ 更广泛的包裹处理能力
除了传统的刚性盒子,Helix 现已能够灵活应对多种新型包裹,包括:
- 聚乙烯袋(PE 袋)
- 加垫信封
- 平信封
- 易变形或起皱的软质包装
它会根据包裹形态动态调整抓取策略,例如:
- 对塑料袋进行轻拍以消除褶皱
- 对平信封采用捏握方式精准定位条码
这种灵活性使得 Helix 能够在面对多样化物流场景时保持高效作业。
✅ 处理速度大幅提升
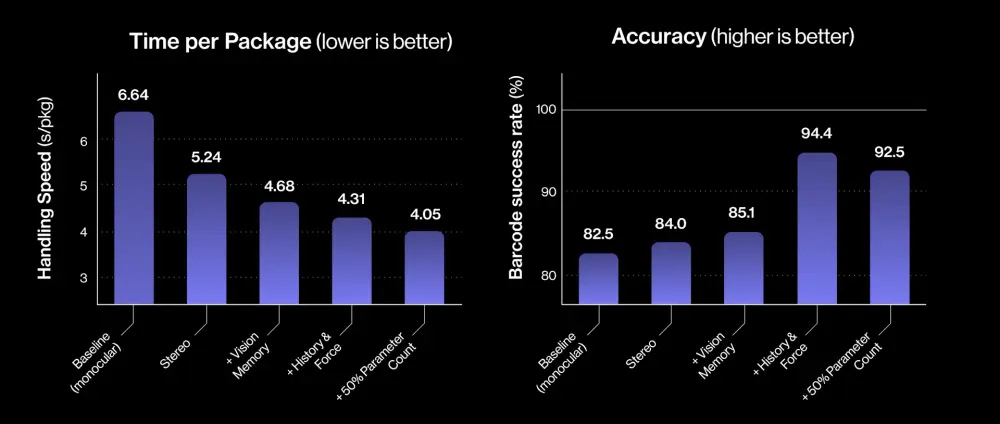
尽管包裹种类更加多样,Helix 的平均处理时间仍从 5.0 秒/件 缩短至 4.05 秒/件,整体效率提升约 20%。
这意味着:
Helix 已经在单位时间内实现了更高的吞吐量,并且仍在持续进化。
✅ 条形码扫描成功率显著提高
通过增强视觉识别与动作控制协同能力,Helix 将条形码扫描的成功率从 70% 提升至约 95%。
其中一大亮点是:机器人学会了“拍平包裹”这一精细动作,用于消除标签区域的褶皱,从而提升扫描效果。这种行为并非编程所得,而是通过大量人类演示自主学习而来。
架构层面的技术演进
这些性能飞跃的背后,是 Helix 模型在多个关键维度上的深度优化。
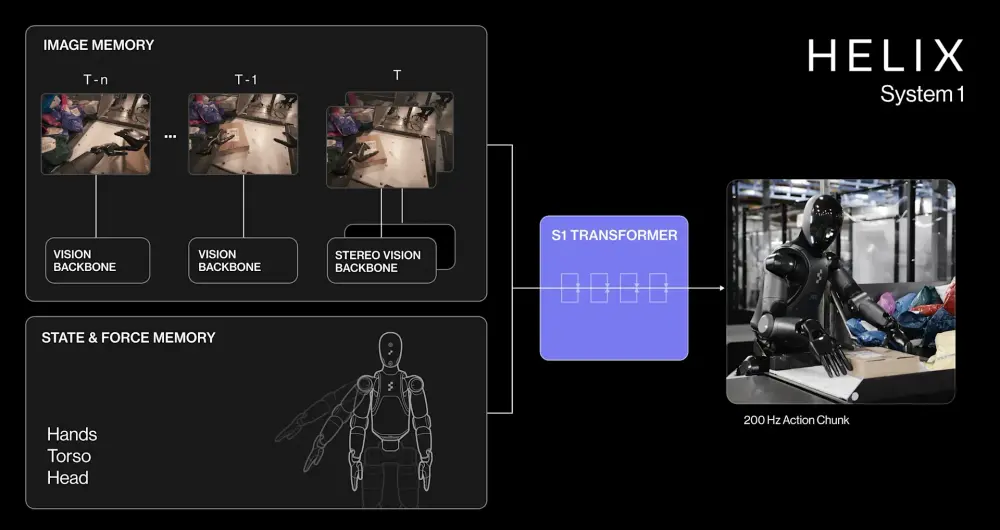
🧠 视觉记忆模块:赋予状态感知能力
Helix 不再仅依赖当前帧图像,而是引入了视觉记忆机制,可以从最近的视频帧中提取特征,形成对环境的连续认知。
这使得机器人可以:
- 记录已检查过的包裹面
- 回忆之前视角下的条形码位置
- 避免重复查看同一面,减少冗余动作
视觉记忆极大提升了多步骤任务的连贯性和成功率。
⏳ 状态历史输入:增强时间上下文感知
除了视觉信息,Helix 还整合了机器人本体状态的历史记录,包括手臂、躯干和头部的位置变化。
这让策略具备更强的时间连续性,即使频繁重新规划路径,也不会丢失任务上下文。在面对突发干扰(如包裹滑动)时,Helix 可以更快做出反应并修正动作。
🤖 力反馈集成:引入触觉感知
Figure 2 机器人现在能够感知与物体接触时的力反馈,并将其作为策略输入的一部分。
这项改进带来了多项优势:
- 准确判断首次接触时刻
- 调整施力以避免压坏包裹
- 实现更稳定的抓取与放置动作
这种“触觉闭环”机制,使 Helix 在处理不同材质、重量和形状的包裹时更具鲁棒性。
数据扩展 + 架构优化 = 性能跃迁
为了验证这些改进的实际影响,团队进行了系统的消融实验和数据扩展分析。
数据扩展的影响
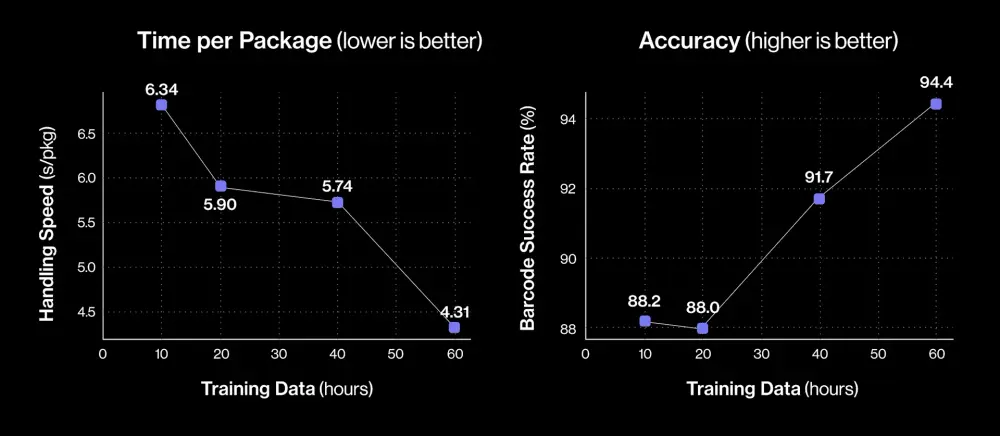
随着训练数据从 10 小时增加到 60 小时:
| 指标 | 10 小时 | 60 小时 |
|---|---|---|
| 包裹处理时间 | 6.84 秒 | 4.31 秒 |
| 条形码成功率 | 88.2% | 94.4% |
这表明:Helix 仍在处于数据驱动的学习红利期,未来仍有巨大提升空间。
架构改进的贡献
通过对不同模块的组合测试,团队确认了各功能组件的具体贡献:
| 模块 | 改善方向 |
|---|---|
| 视觉记忆 | 消除冗余动作,提升成功率 |
| 状态历史 | 增强时间连续性,加快响应 |
| 力反馈 | 提高抓取稳定性与动作一致性 |
最终,结合视觉记忆 + 状态历史 + 力反馈 + 网络容量扩展,Helix 达到了目前最佳表现:平均每包裹处理时间 4.05 秒,准确率稳定在 92% 以上。
从物流迈向通用交互:Helix 的泛化潜力
除了物流分拣任务,Helix 还展现出强大的泛化能力。
例如,通过少量新增演示片段,Helix 学会了识别人类伸手交接的动作信号,并据此作出正确的递送行为——无需额外编程,仅依靠已有模型权重即可完成新任务。
这说明:
Helix 正在逐步成为一个通用的视觉-动作控制器,具备跨任务迁移的能力。
从演示中学习,向人类靠拢
Helix 的最新进展再次证明了基于学习的机器人方法的巨大潜力。通过高质量演示数据和持续的架构优化,Figure 正在构建一个能够在真实世界中自主决策、灵活操作的人形机器人系统。
未来,Helix 将继续扩展技能边界,挑战更高密度的工作负载,并进一步缩小“AI 控制机器人”与“人类操作员”之间的差距。
© 版权声明
文章版权归作者所有,未经允许请勿转载。
相关文章

暂无评论...