Local Dream - 最新版
Local Dream 是一款能让普通安卓手机在本地运行 Stable Diffusion 模型,无需联网或依赖云端算力。更重要的是,该项目已实现对高通 Hexagon NPU 的硬件加速支持,显著提升推理效率。
Image Detection Bypass Utility 是一个功能全面、结构清晰的图像后处理实验平台。其价值在于:参数丰富:覆盖空间、频域、纹理、物理模拟等多个维度;接口开放:支持 ComfyUI 集成与自定义处理逻辑;分析完备:内置前后对比与特征可视化;科研友好:强调可复现性与可控性,对于从事 AIGC 检测、图像归一化或对抗样本研究的人员,这是一个值得尝试的开源工具。
1 人已下载 手机查看
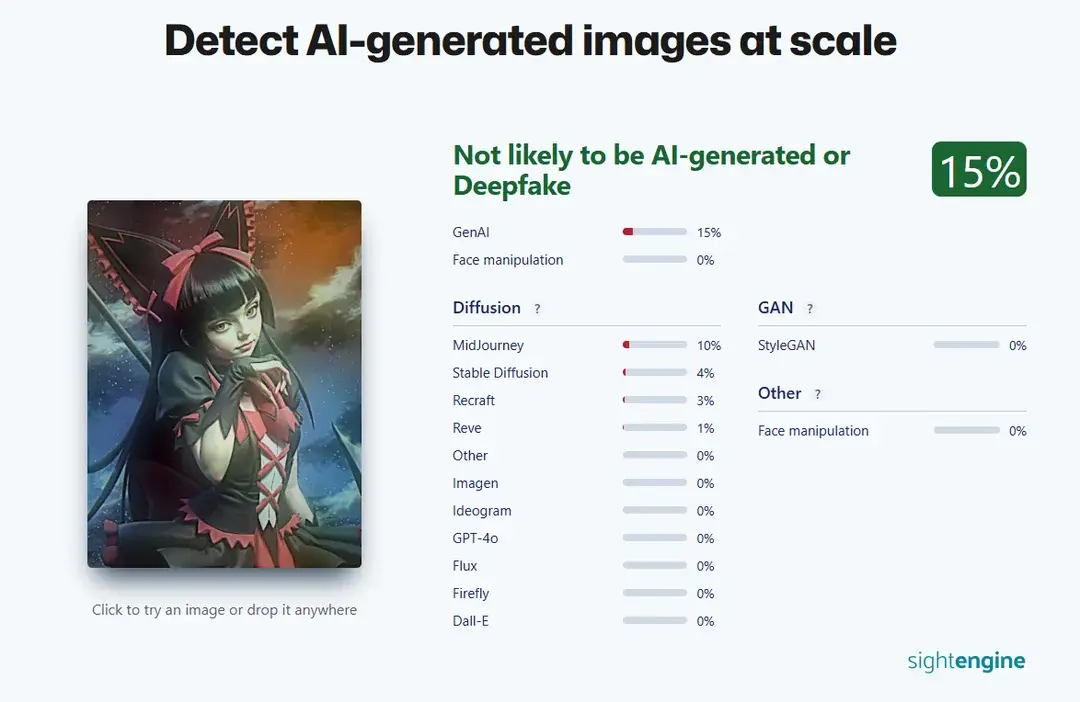
![Image Detection Bypass Utility的使用截图[1]](https://pic.sd114.wiki/wp-content/uploads/2025/09/1756660007-1756660007-Image-Detection-Bypass-Utility-2.webp)
在当前 AI 内容识别(AIGC Detection)日益普及的背景下,如何评估检测模型的鲁棒性、探索其边界行为,已成为图像生成与安全领域的重要课题。
Image Detection Bypass Utility 并非一个“一键去痕”的黑盒工具,而是一个系统化、可解释、可复现的图像后处理实验框架。它将多种图像扰动与传感器模拟技术集成于统一界面,帮助研究者探索 AI 检测系统的薄弱环节,同时保留视觉真实性。
该工具特别适用于:
支持自动与手动两种模式:
涵盖空间域、频域、纹理统计与相机物理模拟,覆盖主流规避策略:
模拟真实相机成像链中的多种物理效应:
custom_nodes 插件使用process_image),便于二次开发
以下为手动模式下可调参数的分类说明与使用建议。
| 参数 | 范围 | 说明 |
|---|---|---|
噪声 std | 0–0.1 | 添加高斯噪声,模拟传感器噪声。建议值:0.01–0.03(轻度),>0.05(强扰动) |
CLAHE clip | - | 自适应直方图均衡化的剪切阈值,控制局部对比度增强强度 |
CLAHE tile | - | 网格分块数,越大越精细,但可能引入人工痕迹 |
📌 建议:CLAHE 可增强局部细节,但过度使用易被检测模型捕捉为“非自然增强”。
频域操作是规避频谱分析类检测器的关键。
| 参数 | 说明 |
|---|---|
傅里叶截止 | 控制保留的频率范围。低值保留平滑结构,高值保留细节 |
傅里叶强度 | 滤波效果的混合比例,1.0 为完全应用 |
傅里叶随机性 | 引入非均匀频域扰动,打破周期性模式 |
相位扰动 | 随机扰动频谱相位,改变空间结构而不显著影响感知质量 |
径向平滑 | 对频谱轮廓进行平滑,模拟自然图像的 1/f 特性 |
📌 模式选择(FFT 模式):
auto:自动选择最佳策略ref:基于参考图像匹配频谱model:使用数学模型(如 1/f^α)生成自然频谱,FFT alpha 控制斜率利用纹理统计特性进行归一化,提升“真实感”。
| 控制项 | 建议 |
|---|---|
| 距离 | [1, 2, 3] 多尺度捕获 |
| 角度 | [0, π/4, π/2, 3π/4] 实现旋转不变性 |
| 级别 | 64 或 32(降低计算量,避免过拟合噪声) |
| 强度 | 0.4–0.8(与 FFT 配合使用,避免过度扭曲) |
| 控制项 | 建议 |
|---|---|
| 半径 | 1–3(小邻域) |
| N 点 | 8–24(推荐 uniform 方法) |
| 方法 | uniform(紧凑且鲁棒) |
| 强度 | 根据目标调整:低值用于微妙匹配,高值用于强纹理注入 |
| 参数 | 说明 |
|---|---|
像素扰动 | 在空间域添加随机抖动,std 越大扰动越强 |
种子 | 设置整数以实现可复现结果;0 表示每次随机 |
启用后,使用 PyTorch + LPIPS 损失进行梯度优化,生成人类不可察觉但能绕过检测的微小扰动。
| 参数 | 说明 |
|---|---|
迭代 | 优化步数(通常 10–50) |
学习率 | 步长(建议 0.01–0.1) |
T LPIPS / C LPIPS | 感知损失阈值与权重 |
T L2 / C L2 | 扰动幅度约束 |
梯度剪切 | 防止梯度爆炸 |
⚠️ 此功能依赖 PyTorch,推荐使用 CUDA 加速。
# 基础依赖
pip install pyqt5 pillow numpy matplotlib piexif opencv-python
# AI Normalizer 依赖(推荐 CUDA 12.6)
pip install torch torchvision --index-url https://download.pytorch.org/whl/cu126
# 或 CPU 版本
pip install torch torchvision
也可直接运行:
pip install -r requirements.txt
git clone https://github.com/PurinNyova/Image-Detection-Bypass-Utility
cd Image-Detection-Bypass-Utility
pip install -r requirements.txt
将文件夹放入 ComfyUI/custom_nodes/ 即可使用。
所有参数最终打包为 args 对象传入 process_image(...),便于模块化处理。
本工具的设计初衷不是鼓励滥用,而是提供一个可控、透明、可分析的实验环境,用于:
通过系统性地应用扰动并观察检测结果变化,研究者可以更深入理解当前检测技术的局限性。